地球變成指南針:CubeSat 小型衛星如何用磁場尋找方向
- 2025年4月22日
- 讀畢需時 5 分鐘
當衛星也得迷路時...
在太空中,沒有道路、沒有指標,甚至沒有東南西北的概念。但衛星仍需知道自己朝哪個方向飛行。這對於小型衛星(如 CubeSat)特別關鍵,因為它們無法像大型衛星那樣安裝昂貴複雜的導航設備。那麼,它們是如何找方向的?
答案其實就藏在我們每天手中拿的指南針背後:地球磁場(Earth’s Magnetic Field)。這片看不見的力量場,不僅守護地球免於太陽風暴的侵襲,也無聲地為太空中的小型探索者們指出方向。如今,衛星工程師已經將這片磁場視為天然的導航網,把它當作衛星的「宇宙 GPS」。但比起 GPS 更厲害的是——它不需要任何地面連線,也不需要電信訊號,靠的只是物理原理與巧妙感測。
🧭 地球磁場:宇宙中的天然導航網
地球就像一顆巨大的磁鐵,擁有從南極延伸到北極的磁力線,形成包覆整個地球的三維磁場。這個磁場不僅保護我們免於太陽風的侵襲,還提供了衛星一張可資辨識的方向「地圖」。
在低軌道(LEO, Low Earth Orbit)中運行的衛星,經常穿越地球磁場變化劇烈的區域,特別是在高緯度與極區附近。這些衛星會搭載磁力儀(Magnetometer),用以持續量測沿三軸(X、Y、Z)方向的地磁強度。所測得的磁場向量會與地磁參考模型——最常用的是國際地磁參考場(IGRF, International Geomagnetic Reference Field)——進行比對。透過比對結果,衛星即可推算出其當前姿態(例如哪個方向朝向地球、哪個方向為軌道切線),這種導航方法廣泛應用於小型衛星與 CubeSat 的姿態判定系統中,因為其低耗能、無需外部訊號,適合自主運行於非 GPS 環境的太空任務。
根據歐洲太空總署(ESA)與 NASA 提供的姿態控制資料,此方法可與太陽感測器、地球邊緣感測器等進行感測器融合,提高姿態推估的穩定性與準確性。

🛰️ 小型衛星的磁力儀:太空中的電子指南針
為了能感應地球磁場,小型衛星通常會搭載一種名為磁力儀(Magnetometer)的設備。這是一種超靈敏的電子裝置,能夠即時感測地球磁場在 X、Y、Z 三個方向的強度與方向變化,轉化為向量數據。
這些數據不僅能用來推算衛星當下的空間姿態,也能配合國際地磁參考場(IGRF)等模型進行比對校正,提升姿態解算精度。磁力儀體積小、功耗低,是 CubeSat 與微型衛星進行姿態判定與初始對地定位的重要元件,並能與其他感測器如陀螺儀、太陽感測器組成姿態感測融合系統。
目前常見的磁力儀類型包括:
類型 | 靈敏度 | 體積與功耗 | 成本 | 適用情境 | 常見應用 |
磁通門磁力儀(Fluxgate) | 高 | 中 | 中 | 主流 CubeSat 姿態控制與精準導航 | 用於大多數低軌道 CubeSat 與微衛星之姿態控制,尤其適用需穩定且長期任務 |
霍爾效應磁力儀(Hall Effect) | 中低 | 小/低功耗 | 低 | 空間與預算受限任務 | 常見於教育型衛星與成本敏感的立方衛星任務中,提供基本姿態偵測能力 |
光泵磁力儀(OPM) | 非常高(可至 nT 等級) | 大/高功耗 | 高 | 精密科學觀測、深空導航 | 應用於重力波偵測任務、深空探測與高精度磁場科學研究中 |
量子磁力儀(Quantum Magnetometers) | 超高(次 nT 等級) | 中高 | 極高 | 高階導航、無 GPS 環境自主定位 | 正在量子導航試驗與未來深空飛行計畫中進行部署測試,例如 Artemis 與 ESA 未來導航構想 |
姿態控制:知道在哪,才能控制去哪
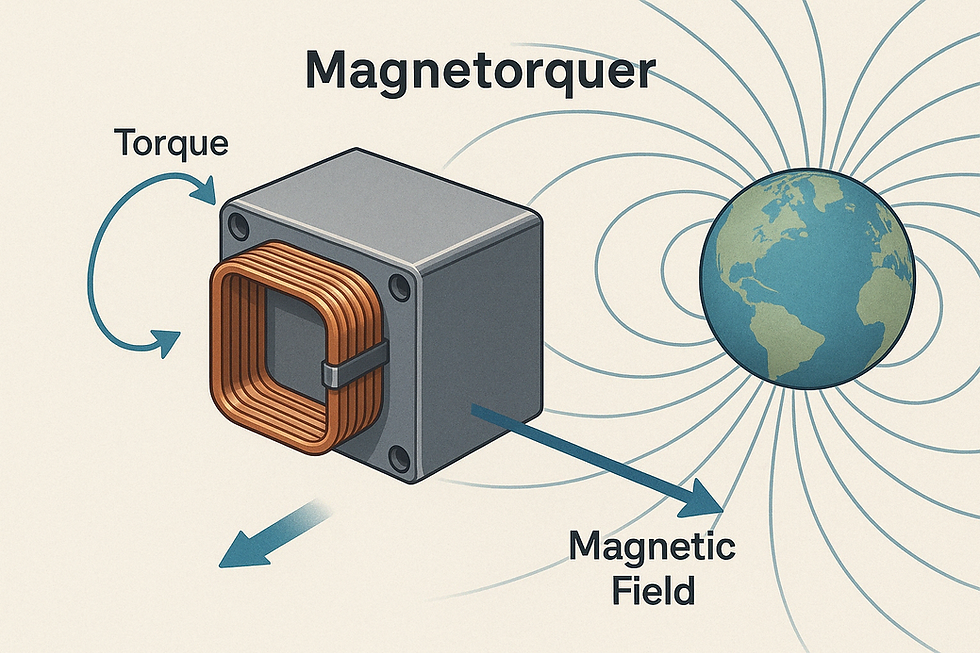
但光知道方向還不夠,衛星還得「轉向」才能執行任務。例如:地球觀測衛星要將鏡頭對準地表;通訊衛星要確保天線指向地面接收站;甚至科學衛星需要穩定鎖定某一顆恆星。這時,磁力扭矩器(Magnetorquers)就派上用場了。
磁力扭矩器是一種能透過導線通電產生磁場的裝置,當此磁場與地球磁場作用時,會產生轉矩(torque),進而改變衛星的姿態。其運作原理基於磁偶極矩與地磁場之間的交互作用,類似於指南針在地球表面自轉的概念。
根據 NASA 小型衛星任務的設計標準,磁力扭矩器被廣泛應用於 CubeSat 等體積與功耗受限的平台。其結構通常包含三軸繞線的電磁線圈(coil),分別對應三個方向,通電後便可產生對應方向的磁場,與當地地磁場互動產生穩定控制力矩。
不過由於地球磁場在軌道上的分布非均勻,磁力扭矩器在赤道與極區表現會有所不同。因此,實務應用中常將其與反作用輪(Reaction Wheel)或磁滯阻尼器(Hysteresis Rod)搭配使用,達成三軸穩定或精細調姿任務。
🚀 應用場景與未來展望
磁場導航與姿態控制技術,已廣泛應用於各類型小型衛星中,包括教育用 CubeSat、地球觀測衛星、氣候監測任務、太空垃圾追蹤、低軌道通訊衛星與新興的地球物理探測任務等。由於其體積小、成本低與低功耗特性,使得這種磁場導引方案成為新創太空任務的主流選項之一。甚至在非航太領域中,例如無人機(UAV)、地面探測機器人或極地移動平台,也會採用磁力儀進行環境導航,特別是在 GPS 訊號弱或失效的場域中,如礦坑、洞穴或極區。
此外,部分智慧手機內建的磁力儀亦屬同一原理應用,廣泛用於電子羅盤、擴增實境(AR)定位與空間感測輔助。這意味著,從太空衛星到手中手機,磁場導航技術其實早已深深融入我們的生活。
實際任務中,如日本東京大學開發的 TRICOM-1R、NASA 在 ELaNa 教學任務中部署的多顆學生衛星,均採用磁力儀結合磁力扭矩器的姿態控制方式。這類結構簡單但可靠的設計,可滿足中低精度任務需求,並具備不依賴 GPS 的自主導航能力。
隨著人工智慧晶片與即時運算模組的快速發展,未來磁場導航系統有望整合邊緣學習技術,讓衛星能即時自我校正導航誤差、預測姿態偏移,並根據任務特性調整感測與輸出策略。
此外,量子磁力儀與量子導航正進入實驗階段,未來若能成功量產與商用,將可實現亞 nT 等級的姿態解算精度,為深空探索、月球與火星衛星網路奠定導航基礎。這項技術同時帶來新的商機,例如在低軌衛星星鏈(LEO constellations)中部署高精度導航模組,可提升通訊穩定性與區域定位精度;國防與災防單位也可能採用無依賴 GPS 的量子導航系統,作為抗干擾與高保密需求的備援方案。預期在 2030 年以前,隨著元件小型化與製程成熟,將出現更多專注於量子導航晶片、模組整合與相關演算法的新創企業,開啟新一波太空導航產業鏈重組與投資熱潮。
地球磁場,不只是指南針的根源,更是讓小型衛星得以在浩瀚太空中穩定導航的關鍵力量。從磁力儀到磁力扭矩器,從姿態推算到自主控制,這一整套無需 GPS 的「天然導航術」,正是未來太空任務高效率、自主化的核心所在。
面對快速擴張的商業衛星與科研任務市場,低成本、高可靠性的磁場導航方案正迎來新一波技術躍進。AI、量子磁力儀、融合感測——這些原本高冷的關鍵字,未來都可能成為太空導航的標配。



留言